Continuous Compliance for Autonomous Agents
A framework for real-time telemetry ingestion and drift detection in non-deterministic AI systems using Splunk Observability.
1. The Non-Deterministic Challenge
Traditional software is deterministic: Input A always yields Output B.
Autonomous AI agents, however, are probabilistic. They "drift." As we
deploy LLM-based agents into critical infrastructure (see
aiops-substrate), ensuring they remain within safety
guardrails is not just a nice-to-have—it's a requirement for sovereign
operation.
We solve this by treating Agent "Thoughts" as loggable events. By
binding a Splunk Technology Add-on (TA) directly to
the agent's runtime environment
(TA-asset-identity-framework), we create a "Sidecar
Observability" pattern.
2. Architecture: The Telemetry Pipeline
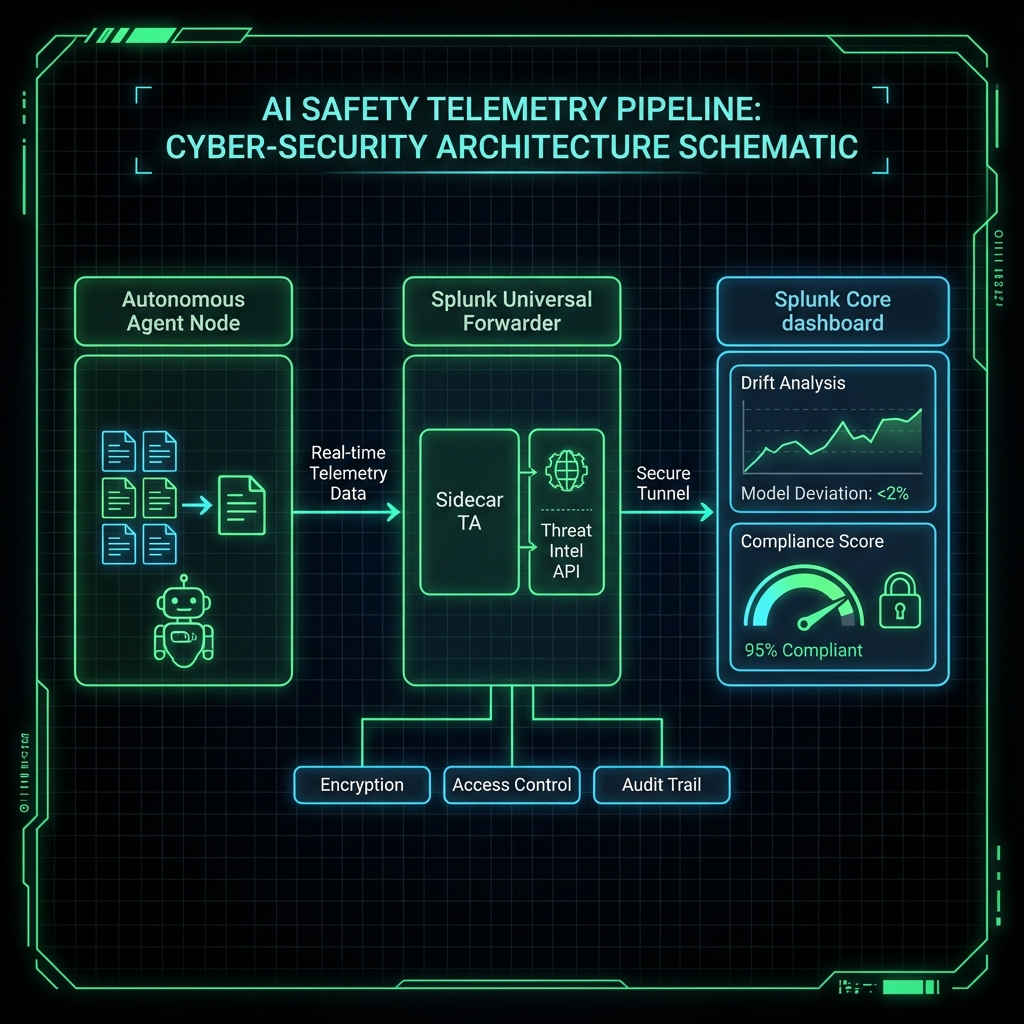
The architecture consists of three core components:
- Agent Nodes: The execution layer where the LLM performs tasks.
-
Universal Forwarder (Sidecar): Captures
stdin/stdoutand internal trace logs. It sanitizes sensitive data before transmission. -
Splunk Core: The aggregation layer where our
TA-suhlabs-eMASSapp correlates agent actions against defined compliance controls.
3. Methodology: Vector Space Drift Detection
How do we know if an agent is "thinking" dangerously? We extract feature vectors from its prompt chain and compare them against a "Safety Manifold"—a pre-computed cluster of approved operational parameters.
Splunk SPL Implementation Strategy
We use Splunk's Machine Learning Toolkit (MLTK/DLTK) to monitor cosine similarity in near real-time.
4. Interactive Safeguard Simulation
Simulate the Drift Detection engine. Enter a command below to see if it triggers the safety kill-switch based on heuristic analysis.